Para cada escala la carta topográfica estará dimensionada, de manera tal que su tamaño no resulte incómodo para los usuarios; al mismo tiempo, satisfará la condición de que al compilar una a escala menor, el número de las cartas que la componen resulte un mínimo y en estas queden enteras.
La identificación de las cartas topográficas se recurrirá a su característica, la que está por un número que la permitirá ubicar geográficamente.
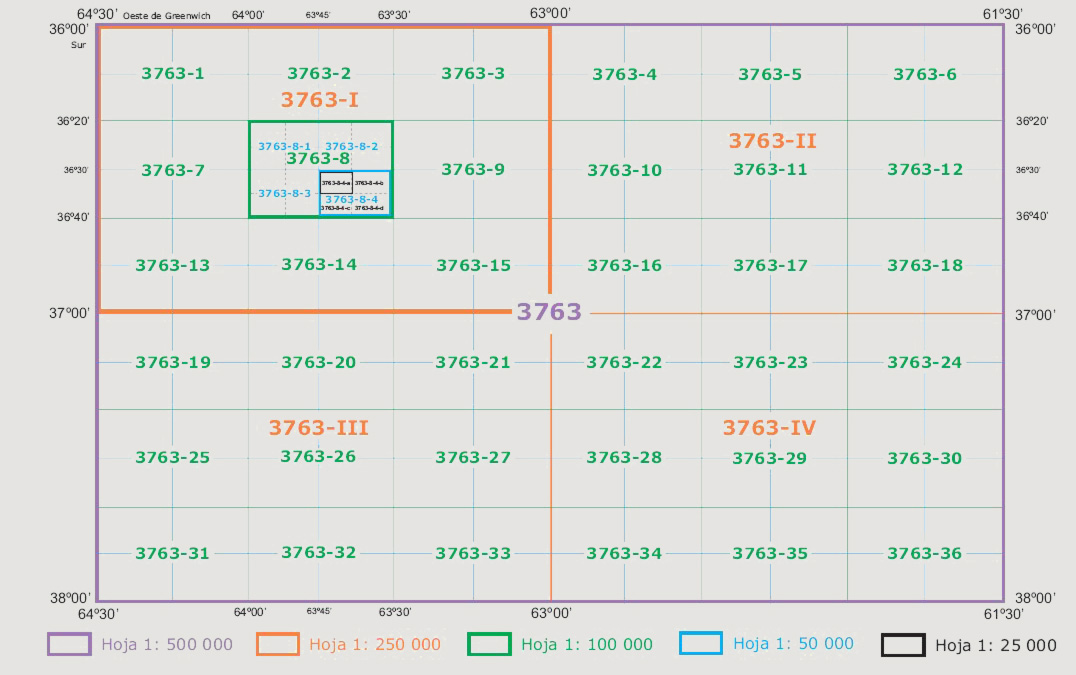
- Cartas a escala 1: 100 000:
- 30’ de longitud por 20‘en latitud; están numeradas del 1 al 36 en sentido de la escritura corriente, dentro de la respectiva carta a escala 1: 500 000 (que tiene 3º en longitud por 2º en latitud, limitadas por paralelos pares de N-S, y como meridiano central el de la faja a la cual pertenecen Ejemplo: 3763.
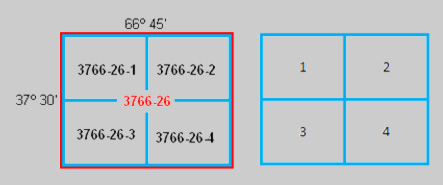
Entonces su característica estará formada por la característica de la hoja a 1: 500 000 que integra y a continuación, separada por un guión, el número de orden que le corresponde por el lugar que ocupa en ella. Por ejemplo 3763-8. - Cartas a escala 1: 50 000:
- 15’ de longitud por 10‘en latitud; están numeradas del 1 al 4 en sentido de la escritura corriente, dentro de la respectiva carta a escala 1:100 000 que la comprende.
Dimensiones y características de las hojas a distintas escalas- IGN
Entonces su característica estará formada por la característica de la hoja a 1:100 000 que integra y a continuación, separada por un guión, el número de orden que le corresponde por el lugar que ocupa en ella. Por ejemplo 3766-26-1
Ejemplo composición del nombre de la carta 100.000
A efectos de cómputos las cartas topográficas que abarcan nuestro territorio nacional aproximadamente son a escala:
| Escalas | Cantidad de Hojas. |
|---|---|
| 1:100 000 | 1898 |
| 1:50 000 | 6986 |
ESCALA
La ESCALA de una carta es la representación gráfica de una porción de la superficie terrestre, realizada de tal manera que guarda relación uniforme y proporcional. Esta relación entre la distancia en el mapa y la correspondiente dirección sobre el terreno se conoce con esta definición.
La escala puede representarse tanto en forma numérica como gráfica.
Con respecto al a ESCALA NUMÉRICA puede representarse de dos maneras como por ejemplo:
Aparece representada mediante una fracción, en cuyo numerador aparece un uno, y en el denominador la proporción de realidad que a esa unidad medida en el mapa corresponde, por ejemplo, una escala 1/50.000, se traduce con que una unidad representada en el mapa son 50.000 de la realidad, así 1 cm. medido en el mapa sería igual a 50.000 cm. de la realidad, es decir, a 500 m. Por tanto, cuanto menor es el denominador mayor es la escala y mayor es el espacio representado en el mapa. Se colocará en forma centrada por encima de la escala gráfica.
La ESCALA GRÁFICA aparece representada mediante una línea recta dividida en segmentos, indicando los kilómetros o metros de la realidad que corresponden a cada tramo del segmento, de forma que permite obtener directamente con cada distancia medida en el mapa o plano, qué distancia corresponde sobre el terreno.
Llevará siempre un dividendo que representa la menor división de la escala a la derecha, expresada en unidades enteras de kilómetros. Ejemplo:
- A la escala 1:50 000, el dividendo tendrá 2 cm dividido en 10 partes.
- A la escala 1:100 000, el dividendo tendrá 1 cm dividido en 10 partes.

Ejemplo de de Escala
Se debe destacar que la "ESCALA” es uno de los elementos fundamentales de un mapa y esta directamente relacionada con el contenido del mismo. La correcta elección es un factor importante para representar con éxito la información deseada.













 Casa de Piedra, Pcia. de Catamarca
Casa de Piedra, Pcia. de Catamarca







